
Πίνακας περιεχομένων:
- Συγγραφέας John Day day@howwhatproduce.com.
- Public 2024-01-30 08:35.
- Τελευταία τροποποίηση 2025-01-23 14:39.

Πριν από λίγο καιρό δημοσίευσα τον ελεγκτή μου Wifi PPM. Λειτουργεί αρκετά καλά. Απλώς το εύρος είναι λίγο μικρό. Βρήκα μια λύση για αυτό το πρόβλημα. Το ESP8266 υποστηρίζει μια λειτουργία που ονομάζεται ESPNOW. Αυτή η λειτουργία είναι πολύ πιο χαμηλού επιπέδου. Δεν χάνει τη σύνδεση τόσο εύκολα και αν χάσει τη σύνδεση, επανασυνδέεται αμέσως.
Χρησιμοποιώ τρία ESP8266. Ο ένας είναι ο δέκτης ESPNOW, ο άλλος είναι ο αποστολέας ESPNOW και ο τρίτος είναι το σημείο πρόσβασης στο οποίο μπορείτε να συνδεθείτε. Το τρίτο είναι απαραίτητο επειδή ο αποστολέας ESPNOW δεν μπορεί να είναι ταυτόχρονα σημείο πρόσβασης. Πρόσθεσα επίσης μερικές κεραίες για καλύτερη απόδοση.
Υπάρχει ένα δεύτερο σημείο πρόσβασης απευθείας στον δέκτη. Εάν συνδεθείτε σε αυτό, έχετε το ίδιο όπως με το παλιό έργο WifiPPM.
Πρόσθεσα επίσης υποστήριξη για δέκτη πρωτοκόλλου MSP. Πρόκειται για το "Σειριακό πρωτόκολλο MultiWii" το οποίο υποστηρίζεται από το MultiWii, το Betaflight, το Cleanflight και πολλά άλλα χειριστήρια πτήσης.
Βήμα 1: Λίστα μερών




Χρειάζεστε τρεις μονάδες ESP8266 οποιουδήποτε είδους. Αλλά θέλετε το καλύτερο εύρος. Προτείνω λοιπόν να χρησιμοποιήσετε μονάδες ESP8266 με κεραίες. Λειτουργεί επίσης χωρίς κεραίες. Χρησιμοποιώ τα ακόλουθα μέρη:
2 x ESP07 (μονάδα ESP8266 με υποδοχή κεραίας)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX στην πλευρά του δέκτη
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / αρσενικό + I-PEX Προσαρμογέας στην πλευρά του αποστολέα
Τροφοδοσία 3, 3 V για όλες τις μονάδες ESP8266
Χρειάζεστε επίσης έναν υπολογιστή με Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 υποστήριξη για Arduino IDE. Ακολουθήστε αυτές τις οδηγίες:
Βήμα 2: Λήψη και αναβάθμιση των σκίτσων



Μπορείτε να κατεβάσετε τα σκίτσα εδώ.
Αποσυμπιέστε το αρχείο. Υπάρχουν τρεις φάκελοι: Master-AP, Sender, Receiver
Master-AP: Είναι το σκίτσο για το σημείο πρόσβασης. Ανοίξτε το σκίτσο με arduino IDE. Ρυθμίστε τη συχνότητα της CPU στα 160 MHz στο μενού εργαλείων και ανεβάστε το σκίτσο στο ESP12.
Αποστολέας: Αυτό είναι το σκίτσο για τον αποστολέα MSPNOW. Ρυθμίστε τη συχνότητα της CPU στα 160 MHz και ανεβάστε την σε ένα από τα ESP07.
Μπορείτε να δείτε στην πρώτη εικόνα πώς να συνδέσετε τη μονάδα ESP8266 για αναβοσβήσιμο.
Τώρα συνδέστε το ESP12 (Σημείο πρόσβασης) και τις σειριακές θύρες αποστολέα ESP07 και συνδέσεις ισχύος (δεύτερη εικόνα): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Ξεκινήστε και τις δύο μονάδες και συνδεθείτε στο σημείο πρόσβασης "Long-Range-WifiPPM/MSP". Ο κωδικός πρόσβασης είναι "WifiPPM/MSP"
Ανοίξτε ένα πρόγραμμα περιήγησης και ανοίξτε τη διεύθυνση IP 192.168.4.1. Θα εμφανιστεί ο ιστότοπος ελέγχου. Κάντε κλικ στο κουμπί "Πληροφορίες Wifi". Θα εμφανιστεί ένα πλαίσιο μηνυμάτων με το MAC αποστολέα και το δέκτη MAC.
Ανοίξτε το σκίτσο του δέκτη στο Arduino IDE. Αλλάξτε τη γραμμή "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (τρίτη εικόνα) στη διεύθυνση Mac του αποστολέα που εμφανίζεται στον ιστότοπο. Ο δέκτης Mac πρέπει να είναι εντάξει. Βεβαιωθείτε ότι η συχνότητα της CPU έχει οριστεί στα 160 MHz και ανεβάστε το σκίτσο στο δεύτερο ESP05.
Βήμα 3: Συνδέστε τον Δέκτη στο Flight Controller και Setup Cleanflight



Συνδέστε τώρα τον δέκτη στο χειριστήριο πτήσης. Ο ελεγκτής πτήσης πρέπει να έχει έξοδο 3, 3 Volt με τουλάχιστον 200 mA. Εάν όχι, χρειάζεστε επιπλέον ρυθμιστή τάσης 3, 3V.
Συνδέστε το GND του ESP με το GND του ελεγκτή πτήσης. Συνδέστε το VCC του ESP στα 3, 3V του ελεγκτή πτήσης ή στον πρόσθετο ρυθμιστή τάσης 3, 3V.
Μπορείτε να χρησιμοποιήσετε την έξοδο PPM ή τη σειριακή έξοδο MSP.
Για έξοδο MSP συνδέστε το TX του ESP8266 με το RX οποιασδήποτε σειριακής θύρας του ελεγκτή πτήσης σας. (Εικόνα 1)
Για έξοδο PPM συνδέστε το GPIO5 του ESP8266 στην είσοδο PPM του ελεγκτή πτήσης. (Εικόνα 1)
Μετά την καλωδίωση του ESP ξεκινήστε το χειριστήριο πτήσης και ανοίξτε την καθαρή πτήση. Συνδεθείτε με το κινητό σας τηλέφωνο στο σημείο πρόσβασης "WifiPPM/MSP". Ο κωδικός πρόσβασης είναι "WifiPPM/MSP"
Για MSP: Ανοίξτε την καρτέλα Θύρες και ορίστε MSP στη σειριακή θύρα που συνδέσατε το ESP8266 (Εικόνα 2). Αποθήκευση και επανεκκίνηση. Μεταβείτε στην καρτέλα διαμόρφωσης και ορίστε τον δέκτη σε "σειριακό δέκτη MSP" (Εικόνα 3). Αποθήκευση και επανεκκίνηση.
Για PPM: Διαβάστε στο εγχειρίδιο του ελεγκτή πτήσης πώς να ρυθμίσετε το PPMGo στην καρτέλα διαμόρφωσης και ρυθμίστε τον δέκτη σε "δέκτη PPM" (Εικόνα 4). Αποθήκευση και επανεκκίνηση.
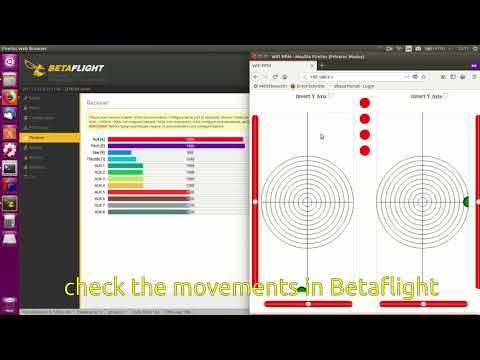
Η επόμενη ρύθμιση είναι και για τους δύο δέκτες το ίδιο: Μεταβείτε στην καρτέλα δέκτη. Ρυθμίστε τα κανάλια σε "RTAE1234" (Εικόνα 5/Βίντεο). Αποθηκεύστε τη ρύθμιση.
Τώρα ανοίξτε ένα πρόγραμμα περιήγησης στο smartphone σας. Ανοίξτε τον ιστότοπο 192.168.4.1 (Εικόνα 6). Τώρα μπορείτε να ελέγξετε τον ελεγκτή.
Εάν λειτουργεί, ξεκινήστε τον δύο αποστολέα ESP8266. Συνδεθείτε στο σημείο πρόσβασης "Long Range WifiPPM/MSP". Ο κωδικός πρόσβασης είναι "WifiPPM/MSP". Ανοίξτε ξανά τον ιστότοπο 192.168.4.1. Ελέγξτε ξανά στην καθαρή πτήση εάν λειτουργεί.
Συνδέστε τις κεραίες στις μονάδες ESP07.
Βήμα 4: Κάποιες περισσότερες πληροφορίες

Υπάρχουν δύο σημεία πρόσβασης σε κανονική λειτουργία. Το σημείο πρόσβασης "WifiPPM/MSP" είναι όπως το προηγούμενο έργο WifiPPM. Μπορείτε να το χρησιμοποιήσετε αν θέλετε απλώς να κάνετε μια γρήγορη πτήση χωρίς να συνδέσετε επιπλέον μονάδες όταν δεν χρειάζεστε σύνδεση μεγάλης εμβέλειας. Εάν συνδεθείτε στο "Long Range WifiPPM/MSP", ο ελεγκτής μεγάλης εμβέλειας αναλαμβάνει τον έλεγχο.
Maybeσως θέλετε να μάθετε πόσο καιρό είναι το "long range". Βασικά δεν ξέρω. Είναι τουλάχιστον μερικές εκατοντάδες μέτρα. Αλλά δεν μπορούσα να το δοκιμάσω μέχρι τώρα. Δεν χάνει τη σύνδεση στο πλήρες διαμέρισμά μου.
Πρόσθεσα έλεγχο MSP επειδή σκέφτηκα ότι θα μπορούσα να δημιουργήσω ένα πίσω κανάλι για δεδομένα τηλεμετρίας. Αλλά αυτό δεν λειτούργησε ποτέ σταθερά. Ούτως ή άλλως, το πρωτόκολλο MSP είναι πιο ακριβές από το ppm, επειδή δεν εξαρτάται τόσο πολύ από το χρονοδιάγραμμα. Maybeσως δημιουργεί προβλήματα με αργούς ελεγκτές πτήσης επειδή υπάρχει μεγάλη κίνηση στη σειριακή θύρα. Με τον ελεγκτή πτήσης Noxe F4 λειτουργεί χωρίς προβλήματα.
Αν έχετε προβλήματα διαμόρφωσης, ανατρέξτε στο παλιό έργο WifiPPM.
Συνιστάται:
Ρομπότ αποφυγής εμποδίων για μεταφορά μεγάλου ωφέλιμου φορτίου: 6 βήματα

Ρομπότ αποφυγής εμποδίων για τη μεταφορά μεγάλου ωφέλιμου φορτίου: Αυτό είναι ένα ρομπότ αποφυγής εμποδίων που κατασκευάστηκε για να μεταφέρει το ρόκερ του γιου μου
Καλή Αλεπού! (Πρώτο στοιχείο ενός μεγάλου έργου): 7 βήματα (με εικόνες)
: 7 βήματα (με εικόνες)")
Καλή Αλεπού! (Πρώτο στοιχείο ενός μεγάλου έργου): Ένα άλλο μικρό έργο ήρθε στο δρόμο μου, θα περιλαμβάνει μια σειρά από μικρά έργα που θα συναντηθούν τελικά. Αυτό είναι το πρώτο στοιχείο, μια αλεπού με μια τριχωτή ουρά που εμφανίζεται και εξαφανίζεται σαν να μαγεία:)
Δημιουργία εύρους εύρους χρησιμοποιώντας λέιζερ και κάμερα: 6 βήματα

Κάνοντας εύρος εύρους χρησιμοποιώντας ένα λέιζερ και μια κάμερα: Αυτή τη στιγμή σχεδιάζω εσωτερικές εργασίες για την επόμενη άνοιξη, αλλά καθώς απέκτησα ένα παλιό σπίτι δεν έχω κανένα σχέδιο σπιτιού. Άρχισα να μετράω αποστάσεις τοίχου σε τοίχο χρησιμοποιώντας έναν χάρακα, αλλά είναι αργός και επιρρεπής σε σφάλματα. Σκέφτηκα να αγοράσω ένα εύρος εύρους
Κάψουλα SSTV για μπαλόνια μεγάλου ύψους: 11 βήματα (με εικόνες)
")
Κάψουλα SSTV για μπαλόνια μεγάλου ύψους: Αυτό το έργο γεννήθηκε μετά το μπαλόνι ServetI το καλοκαίρι του 2017 με την ιδέα της αποστολής εικόνων σε πραγματικό χρόνο από τη στρατόσφαιρα στη Γη. Οι εικόνες που τραβήξαμε αποθηκεύτηκαν στη μνήμη του rpi και μετά, στάλθηκαν χάρη στη μεταφορά
Intel Aero Drone - Επέκταση εύρους WiFi: 9 βήματα

Intel Aero Drone - Extending Wifi Range: Για τις πιο πρόσφατες πληροφορίες και υποστήριξη για το Aero, επισκεφτείτε το wiki μας. Το Aero λειτουργεί ως σημείο πρόσβασης (AP), που σημαίνει ότι μπορείτε να συνδεθείτε σε αυτό ως συσκευή wifi. Αυτό έχει εμβέλεια λίγων μέτρων, το οποίο κανονικά είναι καλό για αναπτυξιακούς σκοπούς, αλλά ας