")
Πίνακας περιεχομένων:
- Προμήθειες
- Βήμα 1: Ρυθμίσεις 3D εκτυπωτή
- Βήμα 2: Δημιουργήστε το δικό σας Otto DIY+
- Βήμα 3: Κωδικοποιήστε το δικό σας Otto
- Βήμα 4: κύριος κωδικός για Bluetooth APP
- Βήμα 5: Αντιγραφή, επέκταση, προσαρμογή, τροποποίηση, διασκευή και κοινή χρήση
- Βήμα 6: Ρύθμιση Bluetooth (BT) (μόνο εάν η σύζευξη δεν είναι επιτυχής):
- Συγγραφέας John Day day@howwhatproduce.com.
- Public 2024-01-30 08:32.
- Τελευταία τροποποίηση 2025-01-23 14:39.




Η πραγματικά ανοιχτή πηγή του Otto επιτρέπει την ανοιχτή εκπαίδευση STEAM, συλλέγουμε σχόλια από διάφορα εργαστήρια και σχολεία σε όλο τον κόσμο που χρησιμοποιούν ήδη το Otto DIY στην τάξη τους και ανάλογα με το άνοιγμα αυτών των εκπαιδευτικών χώρων οργανώνουμε και μοιραζόμαστε επίσης το υλικό του μαθήματος.
Άδεια CC-BY-SA Creative Commons σημαίνει ότι μπορείτε να αντιγράψετε δωρεάν, αλλά πρέπει να δώσετε πιστώσεις στο πρωτότυπο τοποθετώντας τον ιστότοπό μας (https://www.ottodiy.com/)
Το Otto DIY + είναι η βελτιωμένη και προηγμένη έκδοση του αρχικού #OttoDIY, η ιδέα είναι να έχουμε τις ίδιες βασικές δυνατότητες DIY ρομπότ + έλεγχο και προγραμματισμό Bluetooth + σερβοκινητήρες μεταλλικών ταχυτήτων + επαναφορτιζόμενη + αλλαγή λειτουργιών με αισθητήρα αφής + αισθητήρα ήχου + κινήσεις φωτός + άλλες εξόδους +…;
Το συναρπαστικό είναι ότι κάνουμε ανοιχτή ανάπτυξη με κατασκευαστές και χάκερ σε όλο τον κόσμο, ώστε να είμαστε ανοιχτοί σε ιδέες, όχι μόνο από ειδικούς με τους οποίους μπορείτε να συμμετάσχετε μαζί μας, ανατροφοδότηση, κοινωνικό μερίδιο, δοκιμές ή οποιαδήποτε άλλη συνεισφορά που μπορείτε να σκεφτείτε.
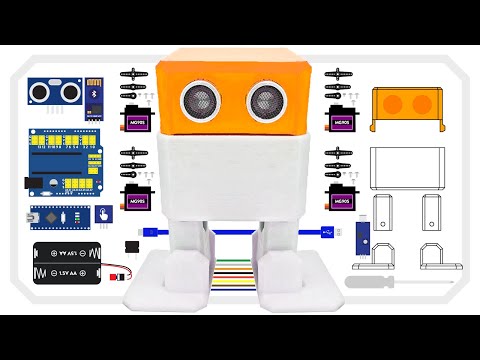
Προμήθειες
1 × Arduino Nano
1 × HC-06 ή HC-05 μονάδα Bluetooth
1 × Arduino Nano Shield I/O. θα μπορούσατε να χρησιμοποιήσετε ένα μίνι breadboard αλλά πολύ περισσότερες καλωδιακές εργασίες
1 × Καλώδιο USB-A σε Mini-USB
4 × Micro servo MG90s (μέταλλο)
1 × Buzzer
10 × Γυναικεία/Γυναικεία καλώδια
1 sensor Αισθητήρας αφής
Αισθητήρας ήχου 1
Μικροδιακόπτης 1 × 8x8mm Αυτόματο κλείδωμα On/Off
Μπαταρία 1 × 3.7 V LiPo με ενισχυτή έως 5V (προαιρετικά) Κατσαβίδι 1 × Phillips 1 x 3D εκτυπωτή (ή χρησιμοποιήστε μια υπηρεσία ή έναν φίλο;))
Βήμα 1: Ρυθμίσεις 3D εκτυπωτή

Είναι σημαντικό να διαβάσετε πρώτα το Otto DIY με οδηγίες για να εξοικειωθείτε με τα βασικά της κατασκευής ενός δίποδου ρομπότ Λάβετε όλα τα μέρη 3D εκτύπωσης STL, κωδικούς και βιβλιοθήκες για Bluetooth πηγαίνοντας εδώ https://wikifactory.com/+OttoDIY/otto-diy- συν στην καρτέλα αρχεία
- Προτείνετε τη χρήση 3D εκτυπωτή FDM με υλικό PLA.
- Δεν χρειάζονται καθόλου υποστηρίγματα ή σχεδίες.
- Ανάλυση: 0,15mm
- Πυκνότητα πλήρωσης 20%
Πρέπει να προσαρμόσετε το μέγεθος ορισμένες αλλαγές χρησιμοποιήστε το αρχείο προέλευσης που δημιουργήθηκε στο Autodesk Fusion 360
Or Tinkercad εδώ
Βήμα 2: Δημιουργήστε το δικό σας Otto DIY+



στο παρακάτω βίντεο και εικόνες μπορείτε να έχετε μια αναφορά στον τρόπο κατασκευής του Otto DIY+, λόγω ορισμένων νέων εκδόσεων του σχεδιασμού ρομπότ.
Βήμα 3: Κωδικοποιήστε το δικό σας Otto





Σε αυτό το σημείο θα πρέπει να έχετε εκτυπώσει Otto 3D, να συναρμολογηθεί, τώρα να προγραμματίζετε βιβλιοθήκες και Arduino στον υπολογιστή σας.
Το πιο εύκολο να κωδικοποιήσετε το δικό σας Otto είναι χρησιμοποιώντας το λογισμικό Blockly, ο πιο προηγμένος κωδικοποιητής μπορεί να δοκιμάσει το Arduino IDE απευθείας.
Βήμα 4: κύριος κωδικός για Bluetooth APP




Ο Ότο πρέπει να είναι έτοιμος να λάβει εντολή μέσω Bluetooth και για αυτό πρέπει να βάλει τον κύριο κώδικα μέσα στον εγκέφαλό του
- Αντιγράψτε τις βιβλιοθήκες Otto στο φάκελο Arduino IDE
- Ανεβάστε το σκίτσο APP.ino στο Otto
-
Κατεβάστε και εγκαταστήστε την εφαρμογή στο smartphone σας. Google Play Store (https://play.google.com/store/apps/details?id=com.ottodiy)
- Τώρα μπορείτε να συνδέσετε τη μονάδα και να ενεργοποιήσετε το Bluetooth στο τηλέφωνό σας.
- Βρείτε το Otto και αντιστοιχίστε τη διεύθυνση /όνομα Bluetooth
- Τώρα μπορείτε να χρησιμοποιήσετε το APP για να ελέγξετε το Otto!
- Παίξτε με τις νέες δυνατότητες και αν όχι, ίσως χρειαστεί να επαναδιαμορφώσετε το BT σας, αλλά μην ανησυχείτε είναι επίσης εύκολο;)
Βήμα 5: Αντιγραφή, επέκταση, προσαρμογή, τροποποίηση, διασκευή και κοινή χρήση




Ελέγξτε αυτήν την ανάρτηση ιστολογίου για να βρείτε ιδέες για το πώς να προσαρμόσετε το δικό σας ρομπότ
Γίνετε μέλος της κοινότητας Otto Builder! Ακολουθήστε μας, κάντε ένα like και μοιραστείτε τη δημιουργικότητά σας, θα μπορούσατε να εμφανιστείτε εδώ κοινοποιώντας το ρομπότ σας σε οποιοδήποτε μέσο κοινωνικής δικτύωσης
Facebook και Instagram
χρησιμοποιήστε το hashtag #ottodiy στην ανάρτησή σας και επισημάνετε ή αναφέρετε το @OttoDIY
Γίνετε μέρος αυτής της φιλικής κοινότητας κατασκευαστών ρομπότ, δασκάλων και κατασκευαστών! καλωσορίζοντας την κοινότητά μας Otto Builder!
Βήμα 6: Ρύθμιση Bluetooth (BT) (μόνο εάν η σύζευξη δεν είναι επιτυχής):
Αυτή η ρύθμιση είναι απαραίτητη ΜΟΝΟ για μονάδες που δεν συνοδεύονται από τον τυπικό ρυθμό baud των 9600, πώς να το ξέρετε; απλά δοκιμάστε πρώτα τον κωδικό και την εφαρμογή, εάν το τηλέφωνο δεν συνδυάζεται με το Otto ή δεν απαντά σε εντολές, τότε πιθανώς σημαίνει ότι η μονάδα σας βρίσκεται σε διαφορετικό ρυθμό baud, οπότε πρέπει να διαμορφωθεί
Ο κωδικός BT έχει 115200 baud-rate, οπότε η μονάδα BT πρέπει να ταιριάζει με αυτήν την ταχύτητα για να μπορεί να επικοινωνεί με το Arduino Nano μέσω σειριακής διεπαφής (UART).
Για HC-05: 38400 ή 115200
1. Ανεβάστε πρώτα το σκίτσο HC05_BT_config.ino στο Nano σας και μετά αποσυνδέστε το Nano από USB.
2. Τώρα συνδέστε το BT στο Arduino Nano όπως φαίνεται στο διάγραμμα, αλλά μην συνδέσετε το VCC.
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Συνδέστε το USB στο Nano και, στη συνέχεια, συνδέστε το VCC, ώστε το BT να εισέλθει στη λειτουργία AT. Η λυχνία LED στο BT θα πρέπει να αρχίζει να αναβοσβήνει πιο αργά, περίπου μία φορά κάθε 2 δευτερόλεπτα. (Εάν αυτό δεν λειτουργεί, δοκιμάστε να κρατήσετε πατημένο το κουμπί στη μονάδα BT ενώ συνδέετε το VCC).
Ανοίξτε τη σειριακή οθόνη στο IDE, ορίστε το ρυθμό baud στο 9600 και η γραμμή τελειώνει σε NL & CR.
Πληκτρολογήστε AT και στη συνέχεια πατήστε enter. (αν όλα είναι σωστά, η BT θα πρέπει να απαντήσει με OK και στη συνέχεια να εισαγάγει τις ακόλουθες εντολές:
AT+NAME = Zowi "ρύθμιση του ονόματος"
AT+PSWD = 1234 "κωδικός πρόσβασης σύζευξης"
AT+UART = 115200, 1, 0 "baud rate"
AT+POLAR = 1, 0 "επιτρέποντας στο STATE pin να χρησιμοποιηθεί ως επαναφορά για τον προγραμματισμό του arduino μέσω BT"
Τώρα μεταβείτε στο βήμα APP
Εάν υπάρχει κάποιο πρόβλημα, ελέγξτε αυτό το πώς μπορείτε να τροποποιήσετε τις προεπιλογές της μονάδας Bluetooth HC-05 χρησιμοποιώντας τις εντολές AT
www.instructables.com/id/Modify-The-HC-05-…
Για HC-06: 9600 ή 115200
Για τη μονάδα HC-06 BT τα πράγματα είναι λίγο πιο απλά γιατί η μονάδα είναι πάντα σε κατάσταση εντολών AT όταν δεν είναι συνδεδεμένη με τίποτα. Αλλά το αρνητικό είναι ότι η μονάδα HC-06 δεν μπορεί να χρησιμοποιηθεί για τη μεταφόρτωση σκίτσων στο Arduino επειδή δεν έχει επαναφέρει. Για τη διαμόρφωση της μονάδας
1. ανεβάστε αυτό το σκίτσο HC06_BT_config.ino στο Nano σας
1. αποσυνδέστε το USB
2. Συνδέστε τη μονάδα BT στο Arduino Nano ως εξής:
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Ενεργοποιήστε το Nano σας και μετά από περίπου 10-15 δευτερόλεπτα θα πρέπει να τελειώσουν όλα και να διαμορφωθεί το BT (το LED13 θα αρχίσει να αναβοσβήνει).
Εάν υπάρχει πρόβλημα, ελέγξτε αυτό το εκπαιδευτικό
ΑΝ ΟΠΟΙΑ ΕΡΩΤΗΣΗ, δεν λαμβάνω ειδοποιήσεις με νέα σχόλια με οδηγίες, οπότε αν κάτι δημοσιεύσετε στην κοινότητά μας
Συνιστάται:
Πώς να φτιάξετε ρομπότ με βάση το Arduino Edge αποφεύγοντας το ρομπότ: 4 βήματα

Πώς να φτιάξετε ρομπότ με βάση το Arduino Edge: Ας φτιάξουμε ένα πλήρως αυτόνομο ρομπότ χρησιμοποιώντας αισθητήρες Arduino και IR. Εξερευνά την επιφάνεια του τραπεζιού χωρίς να πέφτει. Δείτε βίντεο για περισσότερα
Ρομπότ Arduino Otto με κρατική μηχανή: 4 βήματα

Σε αυτό το έργο, θέλω να σας δείξω έναν τρόπο προγραμματισμού του Otto Robot, το οποίο είναι ένα ρομπότ DIY με βάση το Arduino. Χρησιμοποιώντας τα YAKINDU Statechart Tools (δωρεάν για μη εμπορικά) μπορούμε εύκολα να χρησιμοποιήσουμε μηχανήματα κατάστασης για να μοντελοποιήσουμε γραφικά τη συμπεριφορά
Ρομπότ Arduino Με Απόσταση, Κατεύθυνση και Βαθμός Περιστροφής (Ανατολικά, Δυτικά, Βόρεια, Νότια) Ελεγχόμενος με Φωνή χρησιμοποιώντας Ενότητα Bluetooth και Αυτόνομη Κίνηση Ρομπότ .:
 Ελεγχόμενος με Φωνή χρησιμοποιώντας Ενότητα Bluetooth και Αυτόνομη Κίνηση Ρομπότ .:")
Ρομπότ Arduino Με Απόσταση, Κατεύθυνση και Βαθμός Περιστροφής (Ανατολικά, Δυτικά, Βόρεια, Νότια) Ελέγχεται με φωνή χρησιμοποιώντας μονάδα Bluetooth και αυτόνομη κίνηση ρομπότ .: Αυτό το οδηγό εξηγεί πώς να φτιάξετε το Arduino Robot που μπορεί να μετακινηθεί στην απαιτούμενη κατεύθυνση (Εμπρός, Πίσω) , Αριστερά, Δεξιά, Ανατολικά, Δυτικά, Βόρεια, Νότια) απαιτείται Απόσταση σε εκατοστά χρησιμοποιώντας φωνητική εντολή. Το ρομπότ μπορεί επίσης να μετακινηθεί αυτόνομα
Ρολόι λέξεων Arduino - Προσαρμόσιμο και εύκολο στην κατασκευή: 15 βήματα (με εικόνες)
")
Ρολόι λέξης Arduino - Προσαρμόσιμο και εύκολο στην κατασκευή: Ο σύντροφός μου είδε ένα ρολόι σε ένα κατάστημα που σας είπε την ώρα φωτίζοντας τις λέξεις για να γράψετε μια πλήρη γραπτή πρόταση από αυτό που φαινόταν ένα μπέρδεμα τυχαίων γραμμάτων. Μας άρεσε το ρολόι, αλλά όχι η τιμή - έτσι αποφασίσαμε να φτιάξουμε ένα από τα δικά μας σχέδια
[Arduino Robot] Πώς να φτιάξετε ένα ρομπότ σύλληψης κίνησης - Ρομπότ αντίχειρα - Servo Motor - Κωδικός πηγής: 26 βήματα (με εικόνες)
![[Arduino Robot] Πώς να φτιάξετε ένα ρομπότ σύλληψης κίνησης - Ρομπότ αντίχειρα - Servo Motor - Κωδικός πηγής: 26 βήματα (με εικόνες)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[Arduino Robot] Πώς να φτιάξετε ένα ρομπότ σύλληψης κίνησης - Ρομπότ αντίχειρα - Servo Motor - Κωδικός πηγής: 26 βήματα (με εικόνες)")
[Arduino Robot] Πώς να φτιάξετε ένα ρομπότ κίνησης | Ρομπότ αντίχειρα | Servo Motor | Κωδικός πηγής: Ρομπότ αντίχειρα. Χρησιμοποίησε ποτενσιόμετρο σερβοκινητήρα MG90S. Είναι πολύ διασκεδαστικό και εύκολο! Ο κώδικας είναι πολύ απλός. Είναι μόνο περίπου 30 γραμμές. Μοιάζει με σύλληψη κίνησης. Αφήστε οποιαδήποτε ερώτηση ή σχόλιο! [Οδηγίες] Πηγαίος κώδικας https: //github.c