: 5 Βήματα")
Πίνακας περιεχομένων:
- Συγγραφέας John Day day@howwhatproduce.com.
- Public 2024-01-30 08:37.
- Τελευταία τροποποίηση 2025-01-23 14:39.


Καλώς ήρθατε σε ένα νέο έργο !!!
Πρώτα πράγματα πρώτα ήθελα πραγματικά να κάνω μερικά ανατριχιαστικά μάτια όπως κάνουν για κοστούμια και αποκριές. Λατρεύω τα ειδικά εφέ και ήθελα να μάθω και να φτιάξω τα δικά μου animatronic μάτια χρησιμοποιώντας ένα arduino, σερβίς και μπάλες πινγκ πονγκ.
Βήμα 1:
Συγκεντρώστε προμήθειες…
2 σερβοκινητήρες (πήγα με το φθηνότερο δυνατό σε κατάστημα Hobby Town)
arduino uno (adafruit)
ράβδοι σύνδεσης (Χόμπι Τάουν)
2 μισοί άξονες (Hobby Town)
2 μπάλες πινγκ πονγκ
συνδετήρες (Hobby Town)
Κεφαλή φελιζόλ (Michaels)
άλλα είδη…
Βήμα 1: Βήμα 2: Ζωγραφίζοντας τα μάτια


Για το βήμα 2 ήθελα να προχωρήσω και να βάψω τους βολβούς των ματιών που έκανα μόνος μου. Ναι, είναι ελαφρώς μακριά, αλλά από μακριά φαίνονται υπέροχα! Εάν έχετε οποιεσδήποτε ερωτήσεις σχετικά με το χρώμα που χρησιμοποίησα, σχολιάστε παρακάτω και ρωτήστε:)
Κάνοντας τα μάτια:
Χρειαζονται ΥΛΙΚΑ:
4 μικρές λεπτές βούρτσες βαφής
χρώμα
χαρτοπετσέτα
Για να κάνετε τα μάτια ξεκινάτε με δύο μπάλες πινγκ πονγκ και ειλικρινά απλά τις κόβετε στη μέση με ένα μαχαίρι ακριβείας ή έναν κόφτη κουτιού. Στη συνέχεια βάψτε τα πρώτα με λευκή βάση για να κρύψετε τυχόν ατέλειες. Μετά από αυτό, ξεκινήστε να στρώνετε το χρώμα του ματιού που προσπαθείτε να επιτύχετε. Για το δικό μου χρησιμοποίησα πράσινο και μπλε. Η παλέτα χρωμάτων μου ήταν πράσινη, μπλε, άσπρη και μαύρη.
Βήμα 2: Βήμα 3: Βάση μαζί


Βήμα 3: Συγκεντρώστε τη βάση
Χρειαζονται ΥΛΙΚΑ:
ακρυλικά φύλλα
τυχαίο κομμάτι μετάλλου
βίδες
μισοί άξονες
πριόνι (δεν απαιτείται)
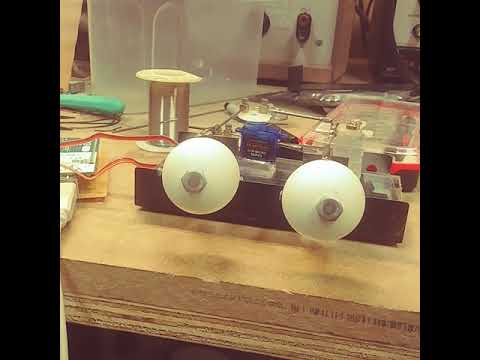
Πρώτα έκοψα το σχήμα και το μέγεθος που ήθελα από ένα ακρυλικό φύλλο. Στη συνέχεια έκοψα τα μεταλλικά στηρίγματα μόνο από ένα παλιοσίδερα. Μόλις τα έφτασα εκεί που τα ήθελα, άνοιξα τις οπές για τις βίδες και ένωσα τα στηρίγματα στη βάση, όπως φαίνεται παραπάνω στην εικόνα. Για ένα από τα servos μου έπρεπε να κόψω ένα μικρό σχήμα ορθογωνίου για να βεβαιωθώ ότι ταιριάζει εκεί. Αυτό έγινε για να βεβαιωθείτε ότι οι σύνδεσμοι και όλα ήταν ευθυγραμμισμένα σωστά.
Βήμα 3: Βήμα 4: Τοποθέτηση υπηρεσιών και συνδέσεων



Βήμα 4: Τοποθέτηση servos και συνδέσεων
Χρειαζονται ΥΛΙΚΑ:
2 μερίδες
συνδέσεις
μικρά ακρυλικά τετράγωνα
βίδες
συνδετήρες
Για το βήμα 4 τοποθέτησα εκεί που θα πάνε όλα και το τοποθέτησα. Για να βεβαιωθώ ότι όλα κάθονται ομοιόμορφα και διδάχθηκαν, έπρεπε να τοποθετήσω μικρά κομμένα κομμάτια ακρυλικού κάτω από ένα από τα σερβίτσια. Έπρεπε να βάλω την ίδια ποσότητα κομματιών κάτω από τη σύνδεση που συνδέει το μάτι με το σερβο. Μετά από όλα αυτά τα μέρη και κολλήστε (όποια και αν είναι η επιλογή σας όσο κολλάει) μπορείτε να συνδέσετε τα μάτια με τους συνδέσμους και τα servos. Ένα κοντινό πλάνο αυτού φαίνεται παραπάνω στην εικόνα 4. Απλώς πρέπει να ανασηκωθεί μια δευτερεύουσα σημείωση κατά την τοποθέτηση των σερβιτόρων και συνδέσεων το σερβο που είναι πιο κοντά στα μάτια καθώς και ο σύνδεσμος ακριβώς δίπλα του. Αυτό συμβαίνει επειδή το ένα τραβά στον άξονα x και το άλλο τραβά στον άξονα y. Αυτό είναι το μεγαλύτερο βήμα και ορισμένα πράγματα μπορεί να χρειαστεί να τροποποιηθούν ακόμη και αφού ολοκληρώσετε τη σύνδεση όλων.:)
Βήμα 4: ΚΩΔΙΚΟ ΒΗΜΑ


Προσθήκη κώδικα στο arduino !! Πάνω τοποθετούνται εικόνες του κώδικα που χρησιμοποιείται για αυτά τα μάτια. Πρόσθεσα ένα χειριστήριο από ένα χειριστήριο PS1 για να είναι ο τρόπος με τον οποίο ελέγχονται τα μάτια.
Βήμα 5: Βήμα 5: Το κεφάλι




Αυτό το βήμα είναι προαιρετικό και απαιτεί χρόνο.
Βήμα 5: Κάνοντας το κεφάλι
Χρειαζονται ΥΛΙΚΑ
Κεφαλή φελιζόλ
μαχαίρι ακριβείας
πιστόλι θερμής κόλλας
Τώρα για αυτό το βήμα είναι προαιρετικό και χρειάστηκε χρόνος. Μου πήρε μάλλον 2 ώρες. Δυστυχώς, ο σύντροφός μου στο έγκλημα εγκατέλειψε κατά λάθος το έργο και έσπασε το κεφάλι αφού τελείωσα. Ούτως ή άλλως για αυτό μόλις κατάλαβα πόσο βαθιά χρειαζόμουν να κόψω από το κάτω μέρος καθώς και από την κορυφή. Το πιο σημαντικό μέρος είναι τα μάτια που χρειάζονται αρκετό χώρο για να κινούνται και να κάνουν κύκλο, όπως μπορείτε να δείτε στη φωτογραφία 5. Η ακρυλική βάση που επέλεξα να κάνω έμεινε στο πλάι όπως μπορείτε να δείτε στη φωτογραφία 6. Αυτό μπορεί να καλυφθεί με ωτοασπίδες ή κάτι αστείο σαν περούκα μέχρι εσάς!
Τότε TADDAAAAA !!!!!! τελειώσατε τελείως με αυτό το έργο.
Ελπίζω να σας αρέσει αυτό και να σχολιάσετε παρακάτω αν έχετε οποιεσδήποτε ερωτήσεις ή οτιδήποτε απλώς ρωτήστε:)
Συνιστάται:
Πώς να εκτελέσετε Servo Motors χρησιμοποιώντας Moto: bit με Micro: bit: 7 βήματα (με εικόνες)
")
Πώς να εκτελέσετε Servo Motors χρησιμοποιώντας Moto: bit Με Micro: bit: Ένας τρόπος για να επεκτείνετε τη λειτουργικότητα του micro: bit είναι να χρησιμοποιήσετε έναν πίνακα που ονομάζεται moto: bit από την SparkFun Electronics (περίπου $ 15-20). Φαίνεται περίπλοκο και έχει πολλά χαρακτηριστικά, αλλά δεν είναι δύσκολο να τρέξει σερβοκινητήρες από αυτό. Moto: bit σας επιτρέπει να
Ένα μοναδικό μοντέλο ρολογιού με υποστήριξη Arduino Servo Motors: 5 βήματα

Ένα μοναδικό μοντέλο ρολογιού με υποστήριξη Arduino Servo Motors: Με αυτό το Instructable θα σας δείξω πώς να δημιουργήσετε ένα ρολόι χρησιμοποιώντας Arduino Nano και Servo μοτέρ. Για να το κάνετε αυτό θα χρειαστείτε τα ακόλουθα στοιχεία
Animatronic Eyes With Remote Control: 5 βήματα

Animatronic Eyes With Remote Control: Αυτή είναι μια οδηγία για το πώς να δημιουργήσετε Animatronic Eyes που μπορούν να ελεγχθούν από απόσταση μέσω υπολογιστή μέσω WiFi. Χρησιμοποιεί ελάχιστα ηλεκτρονικά εξαρτήματα, χωρίς PCB και απαιτεί ελάχιστη συγκόλληση. Μπορείτε να το ελέγξετε από το πληκτρολόγιο του υπολογιστή, οπότε δεν χρειάζεστε ένα e
King Kong Mask With Animatronic Eyes: 4 βήματα (με εικόνες)
")
King Kong Mask With Animatronic Eyes: Αυτό το διδακτικό δείχνει πώς να φτιάξετε μια μάσκα με ρεαλιστικά κινούμενα μάτια. Αυτό το έργο απαιτεί τις ακόλουθες δεξιότητες που δεν καλύπτονται λεπτομερώς: - Ρύθμιση Arduino, προγραμματισμός και μεταφόρτωση σκίτσων - Συγκόλληση - Τρισδιάστατη εκτύπωση
Ανθρωποειδές ρομπότ βασισμένο σε Arduino χρησιμοποιώντας Servo Motors: 7 βήματα (με εικόνες)
")
Ανθρωποειδές ρομπότ βασισμένο σε Arduino χρησιμοποιώντας Servo Motors: Γεια σε όλους, Αυτό είναι το πρώτο μου ανθρωποειδές ρομπότ, κατασκευασμένο από φύλλο αφρού PVC. Διατίθεται σε διάφορα πάχη. Εδώ, χρησιμοποίησα 0.5mm. Προς το παρόν αυτό το ρομπότ μπορεί απλά να περπατήσει όταν ενεργοποιήθηκα. Τώρα εργάζομαι για τη σύνδεση Arduino και Mobile μέσω Bluetooth