")
Πίνακας περιεχομένων:
- Συγγραφέας John Day day@howwhatproduce.com.
- Public 2024-01-30 08:34.
- Τελευταία τροποποίηση 2025-01-23 14:39.



Γεια σας παιδιά..
Έχετε περιπλανηθεί ποτέ για να φτιάξετε έναν πίνακα λαβυρίνθου που μπορεί να ελεγχθεί από το Android smartphone σας….!
Λοιπόν είστε στο σωστό μέρος. Έφτιαξα ένα για τον εαυτό μου χρησιμοποιώντας Arduino και Android.
Μην ανησυχείτε είναι εύκολο,.. Σε αυτό το έργο θα σας δείξω πώς να φτιάξετε:
1. Λαβύρινθος σανίδα (το έφτιαξα από παλιά ξύλινα κουτιά που βρίσκονται γύρω).
2. Εφαρμογή Android σε εφευρέτη εφαρμογών για τον έλεγχο της πλακέτας.
3. Γράφοντας το πρόγραμμα στο Arduino για τον έλεγχο του Διοικητικού Συμβουλίου και
4. Ρύθμιση του κυκλώματος….
Μπορείτε αργότερα να χρησιμοποιήσετε την ιδέα που μαθαίνετε σε άλλα έργα που θα δημιουργήσετε..
Έτσι, χωρίς να χάσουμε άλλο χρόνο, ας ξεκινήσουμε….!
Βήμα 1: Συγκέντρωση των εξαρτημάτων



Για αυτό το έργο θα χρειαστείτε τα ακόλουθα στοιχεία:
1. Δύο σερβοκινητήρες (χρησιμοποίησα μίνι και δούλεψαν για μένα).
2. Arduino Uno. (Προτείνω να το αγοράσω από το snapdeal, είναι κλώνος αλλά αξίζει κάθε δεκάρα που ξόδεψα)
3. Μια μονάδα Bluetooth.
4. Ένα Breadboard.
5. Μερικά καλώδια βραχυκυκλωτήρων
6. Λεπτές ξύλινες ή σκληρές σανίδες
7. καρφιά, μερικές ράβδοι κλειδιών από παλιά πληκτρολόγια
8. Thermocol (Πολυστυρόλιο)
Βήμα 2: Φτιάχνοντας τον πίνακα του Λαβύρινθου



Αυτό είναι το μηχανικό μέρος του έργου..
Πρώτα για τη βάση πάρτε μακρύ ορθογώνιο κομμάτι ξύλινης σανίδας ή χαρτονιού. πρέπει να είναι μεγαλύτερο από την πραγματική πλάκα κλίσης..
Κόψτε δύο μικρά ίσα μεγέθη κυβόξυλο ξύλου.
και προσθέστε ένα καρφί στο καθένα, με τέτοιο τρόπο ώστε να είναι στο ίδιο ύψος από τη βάση. Κόψτε επίσης ένα επιπλέον κομμάτι ξύλου για να το προσθέσετε ως στήριγμα στους πυλώνες..
τώρα για την κορυφαία πλακέτα..
κάνουμε ένα πλαίσιο μικρότερο από τη βάση, αυτός θα είναι ο άξονας x μας, στην εξωτερική όψη των μικρότερων άκρων του πλαισίου κάνουμε μικρές τρύπες ακριβώς στο κέντρο των άκρων. κόψτε τις ράβδους στη μέση και κολλήστε τις στις μεγάλες άκρες του πλαισίου που βλέπουν προς τα μέσα. κόψτε τα στη μέση πριν το κάνετε.
Αυτό θα συγκρατήσει την πάνω σανίδα στο πλαίσιο και θα βοηθήσει στην περιστροφή.
τώρα προσθέστε τους πυλώνες στις εξωτερικές τρύπες για να σταθεί το πλαίσιο στη βάση.
κολλήστε τους πυλώνες στη βάση και επίσης συνδέστε τα στηρίγματα σε αυτά.
τώρα για να προσθέσετε τους σερβοκινητήρες.
ένα θα προσαρτηθεί στη βάση και θα προσαρτηθεί στο πλαίσιο χρησιμοποιώντας μια μικρή ράβδο για να περιστρέψετε το πλαίσιο
ένα άλλο θα είναι προσαρτημένο στο πλαίσιο και θα προσαρτηθεί στην επάνω σανίδα χρησιμοποιώντας μια μικρή ράβδο για να περιστρέψει την πάνω σανίδα.
τα σερβο πρέπει να είναι τοποθετημένα κάθετα μεταξύ τους όπως φαίνεται στις φωτογραφίες.
τώρα ο πίνακας είναι έτοιμος.
έκανα το λαβύρινθο χρησιμοποιώντας θερμόκολλο και μια σανίδα καρτών.
Βήμα 3: Ρύθμιση του κυκλώματος

Ρυθμίστε το κύκλωμα όπως φαίνεται στην εικόνα…
Θυμηθείτε για τα servos που χρησιμοποιώ το κόκκινο σύρμα είναι θετικό, το καφέ είναι αρνητικό και το πορτοκαλί είναι σήμα.
Μονάδα Bluetooth
Το Rx πηγαίνει στην ακίδα 1
Το Tx πηγαίνει στο pin 0
Το καλώδιο σήματος του servo βάσης πηγαίνει στον πείρο 5
Το καλώδιο σήματος του servo πλαισίου πηγαίνει στον πείρο 6
Θυμηθείτε να προσθέσετε πρόσθετη τροφοδοσία για τη μονάδα servo και bluetooth.. άλλη σοφή μονάδα δεν θα έχει αρκετό ρεύμα και θα συνεχίσει να αποσυνδέεται, εμφανίζοντας το σφάλμα 516. Είχα πολύ πρόβλημα να το αντιμετωπίσω και επιτέλους να καταλάβω το πρόβλημα και τη λύση.
Βήμα 4: Δημιουργία της εφαρμογής


Εντάξει πρώτα απ 'όλα πρέπει να συνδεθείτε στο mit app inventor για να δημιουργήσετε οποιεσδήποτε εφαρμογές..
μεταβείτε στη διεύθυνση
και κάντε κλικ στο Δημιουργία εφαρμογής! στην επάνω δεξιά γωνία, εγγραφείτε και είστε έτοιμοι να πάτε….
Όλα τα άλλα που έχω δείξει στο βίντεο.. ρίξτε μια ματιά.
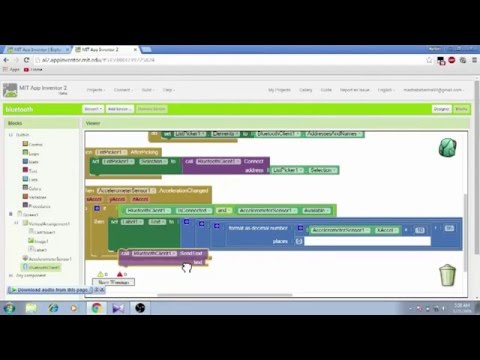
εδώ το βασικό:
όταν η οθόνη αρχικοποιείται στην εφαρμογή (που σε αυτήν την περίπτωση είναι η οθόνη 1), -το επιταχυνσιόμετρο Ο αισθητήρας είναι ενεργοποιημένος και η ευαισθησία έχει οριστεί σε μέγ. δηλαδή 3.
τώρα όταν πατάμε τον επιλογέα λίστας
-εμφανίζεται μια λίστα, στην οποία εμφανίζονται οι συζευγμένες συσκευές.
(θα χρειαστεί να αντιστοιχίσετε τη μονάδα πριν ανοίξετε την εφαρμογή, κανονικά ο κωδικός ζεύγους είναι 1234)
Τώρα πριν επιλέξετε τον επιλογέα λίστας, -ρυθμίστε τη λίστα με τις συζευγμένες συσκευές και τις διευθύνσεις τους
Αφού επιλέξετε τη συσκευή
-ο προσαρμογέας bluetooth θα συνδεθεί με την επιλεγμένη συσκευή
Τώρα η μονάδα είναι συνδεδεμένη
Τώρα, όταν αλλάζουν τα δεδομένα του αισθητήρα acclerometerSensor
-Προσθέστε τα δεδομένα στο κείμενο της ετικέτας και στείλτε τα με το bluetooth send.
Τώρα το δύσκολο κομμάτι είναι η αποστολή των δύο δεδομένων ταυτόχρονα
Τα δεδομένα # acclerometer κυμαίνονται από 0 έως 9,5 όταν γέρνουν αριστερά και 0 έως -9,5 όταν γέρνουν προς τα δεξιά, το ίδιο ισχύει όταν το τηλέφωνο έχει κλίση προς τα κάτω και προς τα επάνω.
έτσι έχουμε δεδομένα κεκλιμένων αξόνων x και y που πρέπει να στείλουμε…
ας τα δεδομένα του άξονα x είναι X και του άξονα y είναι Y
οπότε αυτό που έκανα είναι αυτό:
Κείμενο = "(X*10 (αφαιρέστε τα δεκαδικά ψηφία μετά από αυτό) +95)*1000 (πολλαπλασιάστε με 1000)+Y*10 (αφαιρέστε τα δεκαδικά ψηφία) +95"
έτσι τα δεδομένα κυμαίνονται από 0 έως 190 για κάθε άξονα και προστίθενται για να κάνουν το 190180 όπου τα 3 πρώτα ψηφία είναι x άξονας και τα τελευταία 3 συντεταγμένες άξονα y …
που θα σταλεί στη μονάδα bluetooth και θα αναλυθεί στα πραγματικά δεδομένα και χάρτη με τις γωνίες περιστροφής του σερβο σε κώδικα arduino…
Βήμα 5: Γράψτε τον κώδικα Arduino


Αφού ολοκληρωθεί η εφαρμογή, ας ξεκινήσουμε με τον κωδικό που έχω ανεβάσει τον κωδικό, κατεβάστε τον, μεταγλωττίστε τον και στείλτε τον στο arduino, αλλά περιμένετε πριν στείλετε τον κωδικό, αποσυνδέστε τις καρφίτσες rx και tx της μονάδας bluettoh από τον πίνακα arduino.. και στείλτε τον κωδικό μετά από αυτό μπορείτε να στερεώσετε τις καρφίτσες πίσω..
ο κωδικός που λαμβάνεται από το bluetooth είναι μια συμβολοσειρά που έχει τα δεδομένα του άξονα μας.
τώρα Serial.parseInt (); χρησιμοποιείται για την ανάγνωση της συμβολοσειράς και τη μετατροπή της συμβολοσειράς σε int σε μια μεταβλητή θέση.
τώρα το pos έχει αξία = 190180 (ας πούμε) ο στόχος μας είναι τώρα να αποκρυπτογραφήσουμε τα δεδομένα δηλαδή να αφαιρέσουμε τον άξονα x και τις συντεταγμένες y
για τον άξονα x. διαιρέστε την τιμή με 1000, αυτό θα δώσει 190. δηλ. τιμή/1000 = 190
και για τον άξονα y modular διαιρέστε την τιμή με 1000, η οποία θα μας δώσει 180 δηλ. τιμή%1000 = 180
τώρα υπολογίστε τη μέγιστη και την ελάχιστη θέση των σερβο που θέλετε για κλίση του σκάφους,… στην περίπτωσή μου είναι 180 και 75 και….
τώρα έχουμε συντονίσει τον άξονα x και y, τώρα απλά πρέπει να χαρτογραφήσουμε τις συντεταγμένες με τις ελάχιστες και μέγιστες γωνίες περιστροφής που θέλουμε για τα servos μας….
δείτε τον κωδικό για λεπτομέρειες.
Και τελειώσαμε… ανεβάστε τον κωδικό, ανοίξτε τη σύνδεση σύνδεσης και παίξτε….
Γνωρίζετε ότι το google έχει φτιάξει ένα για τον εαυτό του και είναι ένας πολύ μεγάλος λαβύρινθος που έχετε δει ποτέ … το οποίο είναι επίσης το κίνητρό μου για να φτιάξω ένα για τον εαυτό μου.
Οπότε μέχρι την επόμενη φορά, διασκεδάστε..
Συνιστάται:
DIY 37 Leds Arduino Roulette Game: 3 βήματα (με εικόνες)
")
DIY 37 Leds Arduino Roulette Game: Η ρουλέτα είναι ένα παιχνίδι καζίνο που πήρε το όνομά της από τη γαλλική λέξη που σημαίνει μικρός τροχός
3d Maze Game Using Arduino: 8 Βήματα (με Εικόνες)
")
3d Maze Game Using Arduino: Γεια σας φίλοι, έτσι σήμερα θα κάνουμε ένα παιχνίδι λαβύρινθου χρησιμοποιώντας το ARDUINO UNO. Καθώς το Arduino Uno είναι το πιο χρησιμοποιημένο σανίδι, είναι πολύ ωραίο να φτιάχνετε παιχνίδια με αυτό. Σε αυτό το Instructable αφήνει να γίνει το παιχνίδι λαβύρινθου το οποίο ελέγχεται με χειριστήρια. Μην ξεχνάτε
Arduino Based DIY Game Controller - Arduino PS2 Game Controller - Παίζοντας Tekken With DIY Arduino Gamepad: 7 Βήματα

Arduino Based DIY Game Controller | Arduino PS2 Game Controller | Παίζοντας Tekken With DIY Arduino Gamepad: Γεια σας παιδιά, το να παίζετε παιχνίδια είναι πάντα διασκεδαστικό, αλλά το παιχνίδι με το δικό σας προσαρμοσμένο χειριστήριο παιχνιδιών DIY είναι πιο διασκεδαστικό. Έτσι, θα κάνουμε έναν ελεγκτή παιχνιδιών χρησιμοποιώντας arduino pro micro σε αυτά τα εκπαιδευτικά
Arduino Game Controller + Unity Game: 5 Βήματα

Arduino Game Controller + Unity Game: Σε αυτό το διδακτικό θα σας δείξω πώς να δημιουργήσετε/προγραμματίσετε έναν ελεγκτή παιχνιδιών arduino που μπορεί να συνδεθεί με την ενότητα
Arduino Game Controller With Lights Responding Your Unity Game :: 24 Βήματα

Arduino Game Controller With Lights Responding Your Unity Game :: Αρχικά έγραψα αυτό το πράγμα με λέξη. Αυτή είναι η πρώτη φορά που χρησιμοποιώ το εκπαιδευτικό, οπότε κάθε φορά που λέω: γράψτε κώδικα, ώστε να ξέρετε ότι αναφέρομαι στην εικόνα στην κορυφή αυτού του βήματος. Σε αυτό το έργο χρησιμοποιώ 2 arduino ’ s για να τρέξω 2 ξεχωριστά bit