
Πίνακας περιεχομένων:
- Συγγραφέας John Day day@howwhatproduce.com.
- Public 2024-01-30 08:37.
- Τελευταία τροποποίηση 2025-01-23 14:39.

Σε αυτό το διδακτικό, θα σας δείξω πώς να ελέγχετε τη θέση ενός βηματικού κινητήρα χρησιμοποιώντας ένα ποτενσιόμετρο. Λοιπόν, ας ξεκινήσουμε!
Βήμα 1: Συλλέξτε ανταλλακτικά

Εδώ είναι αυτό που θα χρειαστείτε:
Ένας πίνακας Arduino:- Συνιστάται το Arduino UNO, ως σανίδα φιλικό για αρχάριους.
Βηματικό μοτέρ
Ένας οδηγός βηματικού κινητήρα: -Είτε είναι L298N, AF μοτέρ κινητήρα, A4988 ή DRV8825 (Τα δύο τελευταία συνιστώνται, καθώς η τρέχουσα έξοδος αυτών των προγραμμάτων οδήγησης μπορεί να ρυθμιστεί.).
Ένα ποτενσιόμετρο
Πολλά καλώδια J-jumper
Μερικά καλώδια με άλτη M-F
Μια πηγή ισχύος 12 volt DC
Βήμα 2: Ο κώδικας Arduino

Πριν πραγματοποιήσετε συνδέσεις καλωδίωσης, ανεβάστε πρώτα τον κωδικό στην πλακέτα Arduino. Παρέχεται η βιβλιοθήκη για το πρόγραμμα οδήγησης A4988. Αντιγράψτε το στην επιφάνεια εργασίας, ανοίξτε το Arduino IDE και συμπεριλάβετε τη βιβλιοθήκη ZIP περνώντας την επιλογή "σκίτσο" πριν ανεβάσετε τον κώδικα.
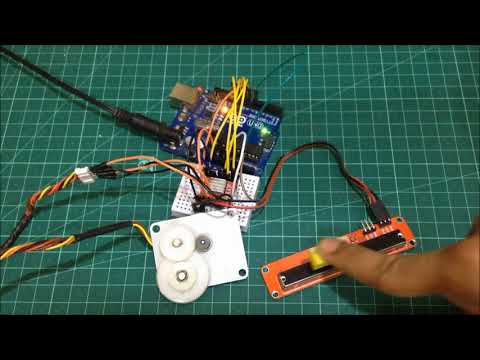
Βήμα 3: Κάντε τις συνδέσεις καλωδίωσης

Ακολουθήστε το σχηματικό κύκλωμα και συνδέστε όλα τα εξαρτήματα χρησιμοποιώντας καλώδια βραχυκυκλωτήρων. Μην αναμιγνύετε τις συνδέσεις ισχύος 12V DC και τις συνδέσεις εξόδου του κινητήρα με την ισχύ 5V ή οποιαδήποτε ψηφιακή είσοδο, διαφορετικά θα ήταν η τελευταία μέρα του μικροελεγκτή και του οδηγού κινητήρα σας σε αυτόν τον κόσμο!
Βήμα 4: Δυναμώστε το

Μόλις ολοκληρωθούν όλες οι καλωδιώσεις και ο έλεγχος, ενεργοποιήστε τη ρύθμιση συνδέοντας την πλακέτα μικροελεγκτή Arduino σε τροφοδοτικό συνεχούς ρεύματος (προτιμάται εύρος 9-12 βολτ) και ενεργοποιήστε τον κινητήρα!
Βήμα 5: Παρακολουθήστε το να λειτουργεί
Ελπίζω να σας αρέσει να κάνετε αυτό το έργο. Θα χαρώ να δω τη δουλειά σας.
Συνιστάται:
Πώς να συνδέσετε και να ελέγξετε μια λάμπα μέσω της μονάδας ZigBee στο Dragonboard: 5 βήματα

Πώς να συνδέσετε και να ελέγξετε μια λάμπα μέσω της μονάδας ZigBee στο Dragonboard: Αυτό το διδάσκον μαθαίνει στο χρήστη πώς να συνδέει και να εγκαθιστά σωστά τη μονάδα ZigBee στο Dragonboard και να την αλληλεπιδρά με έναν λαμπτήρα ελεγχόμενου ZigBee (OSRAM), δημιουργώντας ένα δίκτυο IOT ZigBee. : Dragonboard 410c; CC2531 Dongle USB; Τ
Μια αποκριάτικη μηχανή φοβισμού χρησιμοποιώντας ένα PIR, μια τρισδιάστατη τυπωμένη κολοκύθα και έναν συμβατό ήχο Pranker Troll Arduino/πρακτικό Joke Board .: 5 βήματα

A Halloween Scare Machine Using PIR, 3D Printed Pumpkin and the Troll Arduino Compatible Audio Pranker/πρακτικό Joke Board .: Ο πίνακας Troll δημιουργήθηκε από τον Patrick Thomas Mitchell της EngineeringShock Electronics και χρηματοδοτήθηκε πλήρως στο Kickstarter όχι πολύ καιρό πριν. Πήρα την ανταμοιβή μου μερικές εβδομάδες νωρίτερα για να βοηθήσω να γράψω μερικά παραδείγματα χρήσης και να δημιουργήσω μια βιβλιοθήκη Arduino σε μια προσπάθεια
Πώς να ελέγξετε μια συσκευή χρησιμοποιώντας το Raspberry Pi και ένα ρελέ - ΟΙ ΒΑΣΙΚΕΣ: 6 βήματα

Πώς να ελέγξετε μια συσκευή χρησιμοποιώντας το Raspberry Pi and a Relay - THE BASICS: Αυτό είναι ένα βασικό και απλό σεμινάριο για τον τρόπο ελέγχου μιας συσκευής χρησιμοποιώντας το Raspberry Pi και ένα Relay, χρήσιμο για την κατασκευή έργων IoT. Αυτό το σεμινάριο είναι για αρχάριους, είναι φιλικό προς ακολουθήστε ακόμη και αν έχετε μηδενική γνώση χρήσης Raspberry
Πώς να προσαρμόσετε μια μπαταρία κινητού σε μια ψηφιακή φωτογραφική μηχανή και λειτουργεί!: 5 βήματα (με εικόνες)
")
Πώς να προσαρμόσετε μια μπαταρία κινητού σε μια ψηφιακή φωτογραφική μηχανή και λειτουργεί!: Γεια σε όλους! Το GoPro είναι η τέλεια επιλογή για κάμερες δράσης, αλλά δεν μπορούμε όλοι να αντέξουμε αυτό το gadget. Παρά το γεγονός ότι υπάρχει μια μεγάλη ποικιλία από κάμερες που βασίζονται σε GoPro ή μικρές κάμερες δράσης (έχω ένα Innovv C2 για τα παιχνίδια airsoft μου), όχι όλα τα
Πώς να ελέγξετε ένα Neato Robot από ένα Raspberry Pi: 8 βήματα

Πώς να ελέγξετε ένα ρομπότ Neato από ένα Raspberry Pi: Εάν ενδιαφέρεστε να φτιάξετε ένα ρομπότ Raspberry Pi, το Neato είναι ένα εξαιρετικό ρομπότ για χρήση στο έργο, επειδή είναι φθηνό και έχει πολύ περισσότερους αισθητήρες από το IRobot Create. Αυτό που έκανα για το ρομπότ μου ήταν να συνδέσω ένα Raspberry pi πάνω του με τρισδιάστατη εκτύπωση ενός περιβλήματος