")
Πίνακας περιεχομένων:
- Βήμα 1: Μέρος εκτύπωσης και συναρμολόγησης
- Βήμα 2: Νέα βάση
- Βήμα 3: Μικρή επιδιόρθωση
- Βήμα 4: Σπιτικό PCB
- Βήμα 5: Χάραξη PCB
- Βήμα 6: Άλεση PCB
- Βήμα 7: Φρεζάρισμα PCB: Λήψη αρχείου για παραγωγή
- Βήμα 8: Φρεζάρισμα PCB: η διαδικασία φρεζαρίσματος
- Βήμα 9: Φρεζάρισμα PCB: Καθαρίστε την εργασία
- Βήμα 10: Συγκόλληση του εξαρτήματος
- Βήμα 11: Υλικολογισμικό και Λογισμικό
- Βήμα 12: Δοκιμή
- Βήμα 13: Συνεχίστε τη συναρμολόγηση
- Βήμα 14: Βαθμονόμηση
- Βήμα 15: Πρώτη δοκιμή μανταρινιού
- Βήμα 16: Ευχαριστώ
- Συγγραφέας John Day day@howwhatproduce.com.
- Public 2024-01-30 08:36.
- Τελευταία τροποποίηση 2025-01-23 14:39.


Γεια σε όλους, Θα πραγματοποιήσω τον περίφημο τρισδιάστατο σαρωτή Ciclop.
Όλα τα βήματα που εξηγούνται καλά στο αρχικό έργο δεν είναι παρόντα.
Έκανα κάποια διόρθωση για να απλοποιήσω τη διαδικασία, πρώτα εκτυπώνω τη βάση και στη συνέχεια επανασυνδέω το PCB, αλλά συνεχίστε.
Βήμα 1: Μέρος εκτύπωσης και συναρμολόγησης
Για το τμήμα συναρμολόγησης, η καλύτερη λύση είναι να ανατρέξετε στην τεκμηρίωση origina
www.bq.com/it/support/ciclop/support-sheet
σε πολυγλωσσα και καλα εξηγημενο.
Το τυπωμένο μέρος είναι αρκετά απλό στη συναρμολόγηση.
Υπάρχουν επίσης πολλά βίντεο, το επίσημο είναι αυτό.
Βήμα 2: Νέα βάση


Το μόνο κομμάτι που είναι δύσκολο να βρεθεί είναι η βάση από πλεξιγκλάς, οπότε σχεδιάζω ένα εκτυπώσιμο με τον τρισδιάστατο εκτυπωτή Anet A8.
Μπορείτε να βρείτε το έργο εδώ.
Βήμα 3: Μικρή επιδιόρθωση


Ένα άλλο πρόβλημα είναι ότι πιθανότατα μπορείτε να βρείτε ένα λέιζερ χαμηλού κόστους που δεν ταιριάζει στην αρχική θήκη.
Το κοινό λέιζερ είναι λέιζερ 12mm.
Μπορείτε λοιπόν να χρησιμοποιήσετε αυτήν την εκτυπωμένη παραλλαγή.
Ένα άλλο πρόβλημα είναι να σταματήσετε το περιστρεφόμενο μέρος, νομίζω ότι η καλύτερη λύση είναι να χρησιμοποιήσετε ένα λαστιχάκι, όπως μπορείτε να δείτε στις εικόνες.
Βήμα 4: Σπιτικό PCB

Για αυτό το έργο έκανα ένα PCB πλήρως συμβατό με το αρχικό, η σάρωση Zum είναι πιο περίπλοκη, αλλά όλες οι πρόσθετες δυνατότητες δεν χρησιμοποιούνται.
Η δική μου έκδοση είναι για το Arduino Nano, οπότε είναι λίγο μικρότερη από την αρχική.
Εάν δεν έχετε την ικανότητα να παράγετε αυτόματα PCB, μπορείτε να χρησιμοποιήσετε το αρχείο gerber που μπορείτε να βρείτε στο άρθρο για να σταλεί στο εργοστάσιο που παράγει PCB όπως το
Βήμα 5: Χάραξη PCB
Δεν χρησιμοποίησα ποτέ αυτό το τεχνικό, αλλά προσθέτω σε αυτό το βήμα το αρχείο svg ή το PDF για παραγωγή.
Βήμα 6: Άλεση PCB
Χρησιμοποιώ αυτό το τεχνικό για την προσωπική μου παραγωγή, για αυτό γράφω 2 άρθρα:
Ο πρώτος είναι ένας οδηγός βήμα προς βήμα για τη δημιουργία ενός φορητού CNC τέλειου και βελτιστοποιημένου για CNC Milling.
Εδώ ο οδηγός.
Από έναν προηγούμενο οδηγό που εξηγούσε βήμα προς βήμα πώς να χρησιμοποιήσετε το μηχάνημα, πώς να δημιουργήσετε ένα PCB και πώς να δημιουργήσετε ένα αρχείο για παραγωγή.
Εδώ ο άλλος οδηγός.
Βήμα 7: Φρεζάρισμα PCB: Λήψη αρχείου για παραγωγή
Προσθέτω εδώ το αρχείο για παραγωγή, το gerber ή απευθείας το gcode για τη φρέζα
Βήμα 8: Φρεζάρισμα PCB: η διαδικασία φρεζαρίσματος



Πρώτα αλέστε τον χάλκινο πάτο και μετά ανοίξτε την τρύπα.
Βήμα 9: Φρεζάρισμα PCB: Καθαρίστε την εργασία


Στη συνέχεια χρησιμοποιήστε χαρτί άμμου για να κάνετε τον πίνακα επίπεδο και καθαρό.
Βήμα 10: Συγκόλληση του εξαρτήματος



Για αυτόν τον πίνακα χρησιμοποιώ:
- Arduino Nano
- A4988 Stepper πρόγραμμα οδήγησης
- 2x 1k αντίσταση
- 1x αντίσταση 10k
- 2x 2n2222 τρανζίστορ
- 5.5 Βαρέλι για τάση εισόδου
Χρησιμοποιώ τροφοδοτικό 12v 2A (στο βαρέλι) για να τροφοδοτήσω ένα πρόγραμμα οδήγησης stepper.
Από τη σύνδεση USB είναι αρκετό για λέιζερ και Arduino.
Βήμα 11: Υλικολογισμικό και Λογισμικό

Μπορείτε να κατεβάσετε το υλικολογισμικό για μεταφόρτωση στο Arduino από εδώ
github.com/bqlabs/horus-fw
Όπως περιγράφεται στον οδηγό, η κάμερα είναι μια κάμερα Logitech C270 HD, το πρόγραμμα οδήγησης εδώ.
support.logitech.com/en_ca/product/hd-webca…
Μπορείτε να βρείτε λογισμικό εδώ.
horus.readthedocs.io/el/release-0.2/
εάν έχετε κάποιο πρόβλημα με τη λήψη, μπορείτε να πάτε εδώ
github.com/LibreScanner/horus/releases
Βήμα 12: Δοκιμή

Πρώτα δοκιμάζω όλα χωρίς κάμερα και λειτουργεί καλά.
Μπορείτε να χρησιμοποιήσετε το αρχείο ino για να ελέγξετε το λέιζερ και το βήμα
Βήμα 13: Συνεχίστε τη συναρμολόγηση


Στη συνέχεια προσθέτω κάμερα, διορθώνω τον πίνακα και προσθέτω ένα μαύρο χαρτί στο πάνω μέρος της πλατφόρμας.
Βήμα 14: Βαθμονόμηση
Υπάρχουν πολλά βίντεο σχετικά με τη βαθμονόμηση, αυτό το βήμα είναι πολύ απλό.
Συνειδητοποιώ αυτό το ελάχιστο βίντεο με το νέο μου Ciclop.
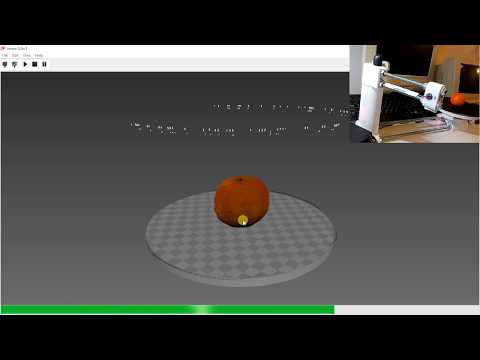
Βήμα 15: Πρώτη δοκιμή μανταρινιού
Σε αυτό το βίντεο σαρώνω μόνο το αντικείμενο, αλλά για να έχετε μια καλή εικόνα πρέπει να κάνετε κάποια επεξεργασία μετά από ένα λογισμικό όπως το MeshLab.
Βήμα 16: Ευχαριστώ
Τώρα ξεκινήστε τη σάρωση όλων.
Συνιστάται:
Σύστημα ειδοποίησης αντίστροφης στάθμευσης αυτοκινήτου Arduino - Βήματα βήμα προς βήμα: 4 βήματα

Σύστημα ειδοποίησης αντίστροφης στάθμευσης αυτοκινήτου Arduino | Βήματα βήμα προς βήμα: Σε αυτό το έργο, θα σχεδιάσω ένα απλό κύκλωμα αισθητήρα στάθμευσης αντίστροφης στάθμευσης αυτοκινήτου Arduino χρησιμοποιώντας Arduino UNO και υπερηχητικό αισθητήρα HC-SR04. Αυτό το σύστημα ειδοποίησης αυτοκινήτου με βάση το Arduino μπορεί να χρησιμοποιηθεί για αυτόνομη πλοήγηση, κλίμακα ρομπότ και άλλα εύρη
Βήμα προς βήμα Κτίριο υπολογιστή: 9 βήματα

Βήμα προς βήμα Κτίριο υπολογιστή: Αναλώσιμα: Υλικό: Μητρική πλακέτα CPU & CPU coolerPSU (μονάδα τροφοδοσίας) Αποθήκευση (HDD/SSD) RAMGPU (δεν απαιτείται) Θήκη Εργαλεία: Κατσαβίδι βραχιόλι ESD/matsthermal paste με εφαρμοστή
Ακουστική Αλλαγή με Arduino Uno Βήμα προς βήμα (8 βήματα): 8 Βήματα
: 8 Βήματα")
Acoustic Levitation With Arduino Uno Βήμα προς βήμα (8 βήματα): υπερηχητικοί μετατροπείς ήχου L298N DC τροφοδοτικό θηλυκού με αρσενικό dc pin Arduino UNOBreadboardΠώς λειτουργεί: Πρώτα, ανεβάζετε κώδικα στο Arduino Uno (είναι ένας μικροελεγκτής εξοπλισμένος με ψηφιακό και αναλογικές θύρες για μετατροπή κώδικα (C ++)
RC Tracked Robot Using Arduino - Βήμα προς βήμα: 3 Βήματα

RC Tracked Robot Using Arduino - Step by Step: Γεια σας παιδιά, επιστρέφω με ένα άλλο δροσερό πλαίσιο Robot από το BangGood. Ελπίζω να έχετε περάσει από τα προηγούμενα έργα μας - Spinel Crux V1 - The Gesture Controlled Robot, Spinel Crux L2 - Arduino Pick and Place Robot with Robotic Arms and The Badland Braw
Πώς να δημιουργήσετε έναν ιστότοπο (ένας οδηγός βήμα προς βήμα): 4 βήματα
: 4 βήματα")
Πώς να δημιουργήσετε έναν ιστότοπο (ένας οδηγός βήμα προς βήμα): Σε αυτόν τον οδηγό, θα σας δείξω πώς οι περισσότεροι προγραμματιστές ιστοσελίδων δημιουργούν τους ιστότοπούς τους και πώς μπορείτε να αποφύγετε τους ακριβούς κατασκευαστές ιστότοπων που συχνά είναι πολύ περιορισμένοι για μεγαλύτερο ιστότοπο. Επίσης σας βοηθά να αποφύγετε κάποια λάθη που έκανα όταν ξεκίνησα